The Electronic Dolphin is a small robot developed by engineers from RMIT University in Australia to test an innovative method for cleaning oil spills from the ocean. It is a remote-controlled mini-robot that uses a pump inside its body to suck up a thin, rainbow-colored layer of oily water as it glides along the surface of a tank. The water behind the robot returns to its original clarity.
Dr. Ataur Rahman, an engineer at RMIT University, explains that traditional methods of cleaning up oil spills involve the use of chemical dispersants, large vessels that skim the water, or absorbent materials.
These approaches usually require large amounts of power to operate and can have their own environmental impacts. Dr. Rahman and his team instead focused on developing a small robot that can remove oil from a specific area of water without posing a risk to human workers in the vicinity of the cleanup operation.
“Oil spills can cause significant harm to the environment and to the economy, so we wanted to develop a solution that could be deployed quickly, be controlled accurately, and operate in areas where it would be too dangerous for people to work,” says Dr. Rahman.

The Electronic Dolphin is designed as a small robotic platform and has a coated filter located at its front. The device’s filter draws liquid from the surface of the water into an onboard storage compartment through a pump as it travels across the water.
Through controlled testing, the prototype recovers approximately 2 milliliters of oil every minute at greater than 95 percent purity. During tests, the filter continues to function without becoming saturated with water.
The robot currently operates for about 15 minutes on a single battery charge. Future designs could extend this operating time depending on the size of the internal pump and the amount of oil that can be stored.
The unique coating on the filter body is what makes the device work.
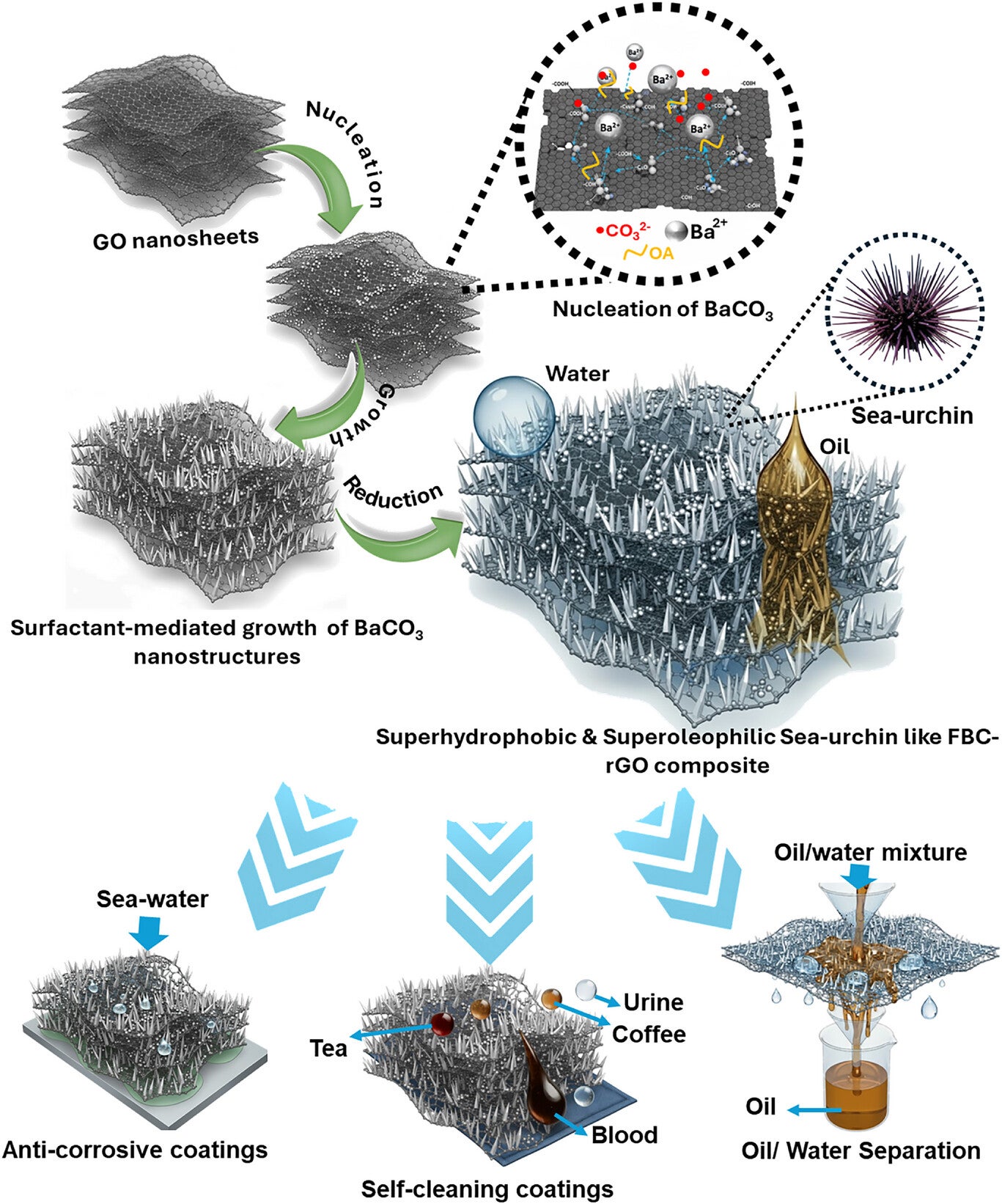
When magnified under a microscope, the coating resembles the surface of a sea urchin, with thousands of vertical spikes similar to sea urchin spines. When barium carbonate crystals separate and grow outward from reduced graphene oxide sheets, thousands of tiny spikes are created. This process increases the density of spikes and forms a dense cluster of microscopic structures.
Air bubbles become suspended between the spikes. This creates a condition in which water rolls off the surface, while oil spreads across the surface of the filter and absorbs into the filter material.

With this coating material, two properties appear that are rare in materials science: superhydrophobicity and superoleophilicity. These characteristics arise from the shape of the microscopic spikes that form the material.
When tested in laboratories, the coated material shows a contact angle of about 154 degrees for water. This means water droplets rest on the surface of the coated material with very little contact. Oil, however, absorbs into the material almost instantly upon contact.
The difference in how water and oil interact with the surface allows oil to separate from a water matrix at the filter.
Almost all modern oil-separation coatings rely on fluorinated chemicals such as PFAS. These materials are effective at separating oil from water but are highly persistent in the environment.
The RMIT University team instead used a non-fluorinated approach. They created a hybrid structure using barium carbonate crystals, oleic acid molecules, and graphene-based nanosheets to produce the coating.
The newly developed coating can be applied to a variety of substrates, including polyurethanes, fabrics, and metals. In testing, a sample of the hybridized polyurethane coating absorbs oil and solvents such as kerosene and diesel at rates ranging from 15 to 65 times its dry weight, depending on the fluid.
The separation efficiency of the hybridized polyurethane coating maintains high performance, exceeding 97 percent efficiency across several hydrocarbons, including diesel, kerosene, and vegetable oil.

The prototype robot itself, described by researchers as a performance module, was designed with a streamlined body shape. It was printed using PLA plastic. The propulsion and control system came from a modified toy platform that includes added components such as a camera, Wi-Fi electronics, and a small motor.
The operator uses a smartphone app to guide the robot’s movement while simultaneously viewing a live feed from the onboard camera. Using rudder thrusters, the robot can travel forward or backward and maneuver across the water’s surface.
The oil-filtering device is mounted at the front of the robot. It pulls oil into the interior of the robot through a membrane and directs it into a small internal compartment.
Because the robot has a draft of less than 2.5 centimeters, it can navigate shallow waters that larger spill-response vessels cannot reach.
PhD researcher Surya Kanta Ghadei, who contributed to developing the filtering material, also has a personal connection to the project.
“I grew up in India and saw how disastrous oil spills can be to marine animals, especially turtles; this experience really stuck with me,” Surya says. “Since I started my PhD, I have wanted to develop an oil response device that would help responders deal with oil spills more quickly and keep marine life safe from harm.”
Researchers are now investigating ways to increase the surface area of the filter and improve its pumping capacity so the robot can collect oil more quickly.
In addition to increasing operational capacity, the team plans to conduct durability testing and perform field studies. These tests will help determine how the device performs in realistic marine environments.
According to Rahman, the ultimate goal is to design a system capable of continuous operation with minimal human interaction.
“We envision a fleet of dolphin-sized robots that would suck up oil using their vacuums. They would return to their home base to empty their tanks, recharge their batteries, and continue their missions without human oversight.”
If the technology can eventually be scaled up, small robotic oil skimmers could complement existing spill-response technologies. They may be especially useful in conditions where human response teams cannot safely operate, such as shallow shorelines, marshes, or contaminated hazard zones.
By combining environmentally friendly coatings with robotic deployment systems, the approach aims to reduce cleanup time and limit the environmental damage caused by oil spills.
Research findings are available online in the journal Small.
The original story “Inside the dolphin-inspired robot designed to clean oil spills” is published in The Brighter Side of News.
Like these kind of feel good stories? Get The Brighter Side of News’ newsletter.
The post Inside the dolphin-inspired robot designed to clean oil spills appeared first on The Brighter Side of News.

