The slowest part of a Mars mission is often not the driving, it is the waiting.
A rover can only do so much when every move must be planned from Earth, then checked, then sent back across a gap that can stretch communication delays to between four and 22 minutes one way. Moreover, limited data transfer and dangerous terrain make a cautious style of exploration necessary. As a result, rovers may cover only a few hundred meters in a day.
A new study suggests there is a faster way to work. In tests at the University of Basel’s Marslabor facility, researchers showed that a semi-autonomous four-legged robot could move to several targets in sequence and deploy instruments on its own. Despite this independence, the robot still returned scientifically useful results for planetary prospecting and the search for signs of past life.

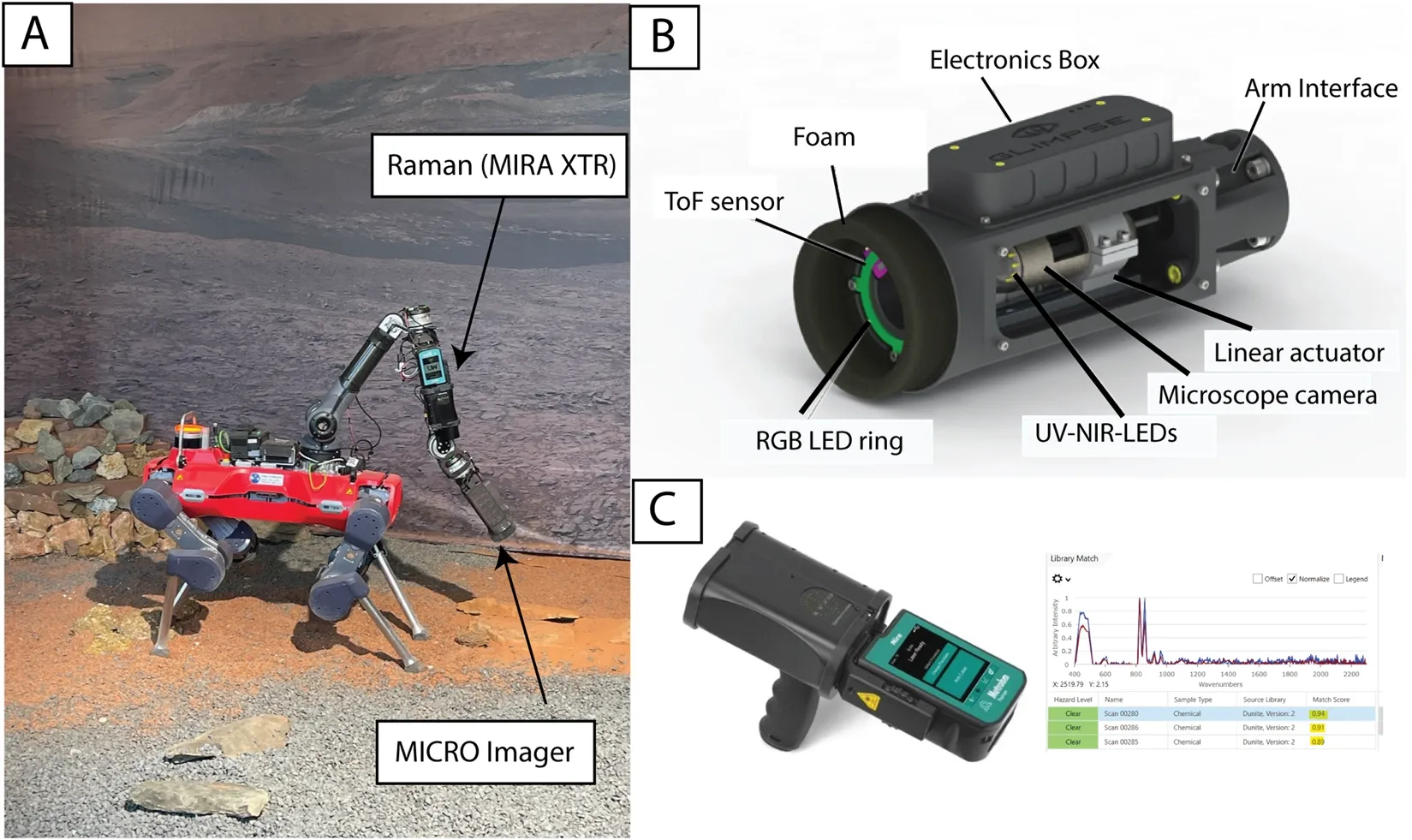
The robot used in the study was ANYmal, a quadrupedal machine equipped with a robotic arm. Attached to that arm were two tools: a microscopic imager called MICRO and a portable Raman spectrometer. Furthermore, the work was carried out with collaborators from the Robotic Systems Lab at ETH Zurich, ETH Zurich | Space, the University of Zurich, the University of Bern, and the University of Basel.
The team wanted to answer a practical question. Could a robot with a relatively simple science payload examine several targets quickly? If so, could it still identify rocks that matter for astrobiology and future resource use?
Their results suggest it could.
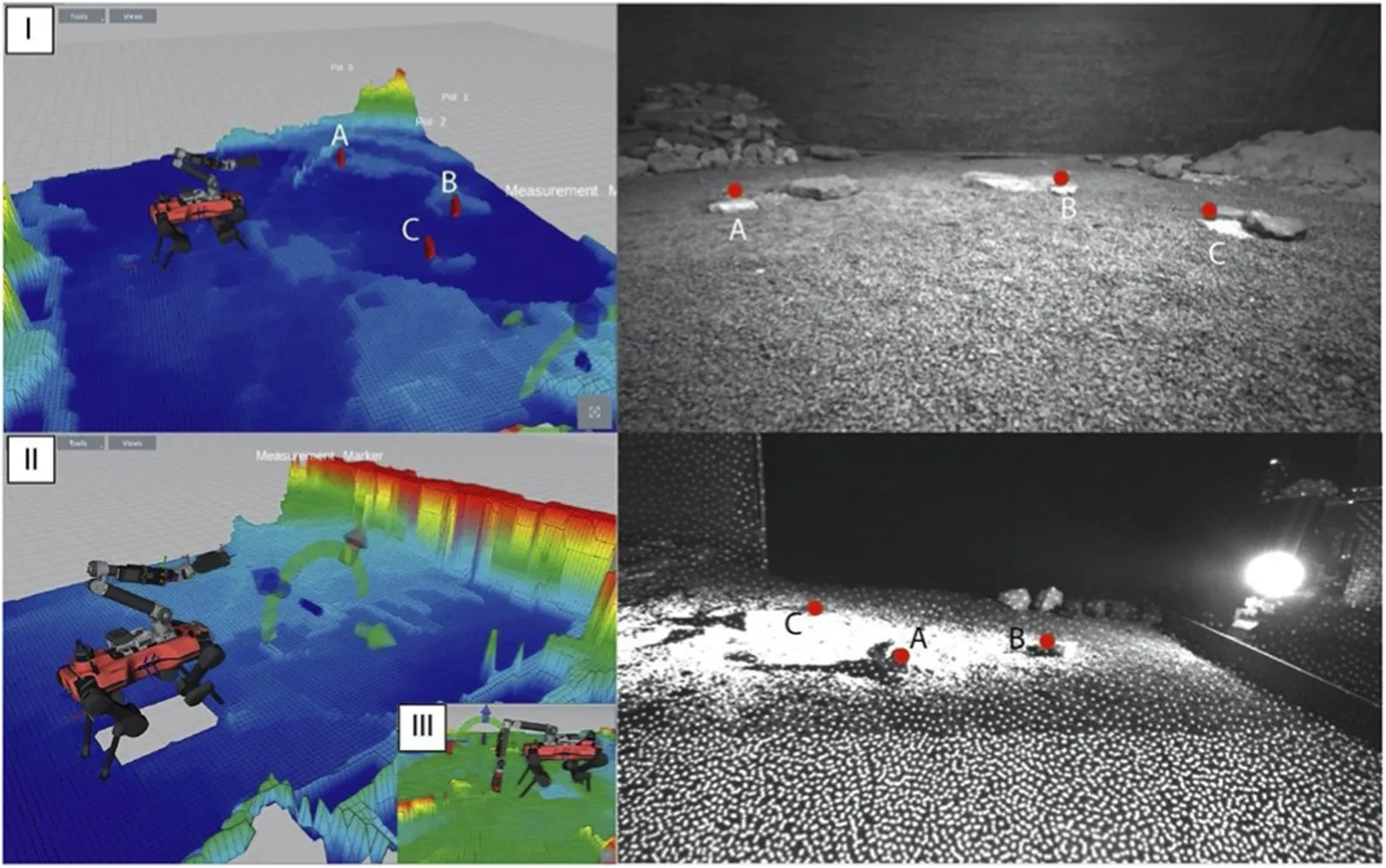
In the Mars-style tests, the robot worked through multiple preselected targets with limited human intervention. Those multi-target missions took between 12 and 23 minutes. By comparison, a more traditional, human-supported lunar-style mission took 41 minutes. In that mission, operators reviewed results after each step and adjusted the plan as they went.
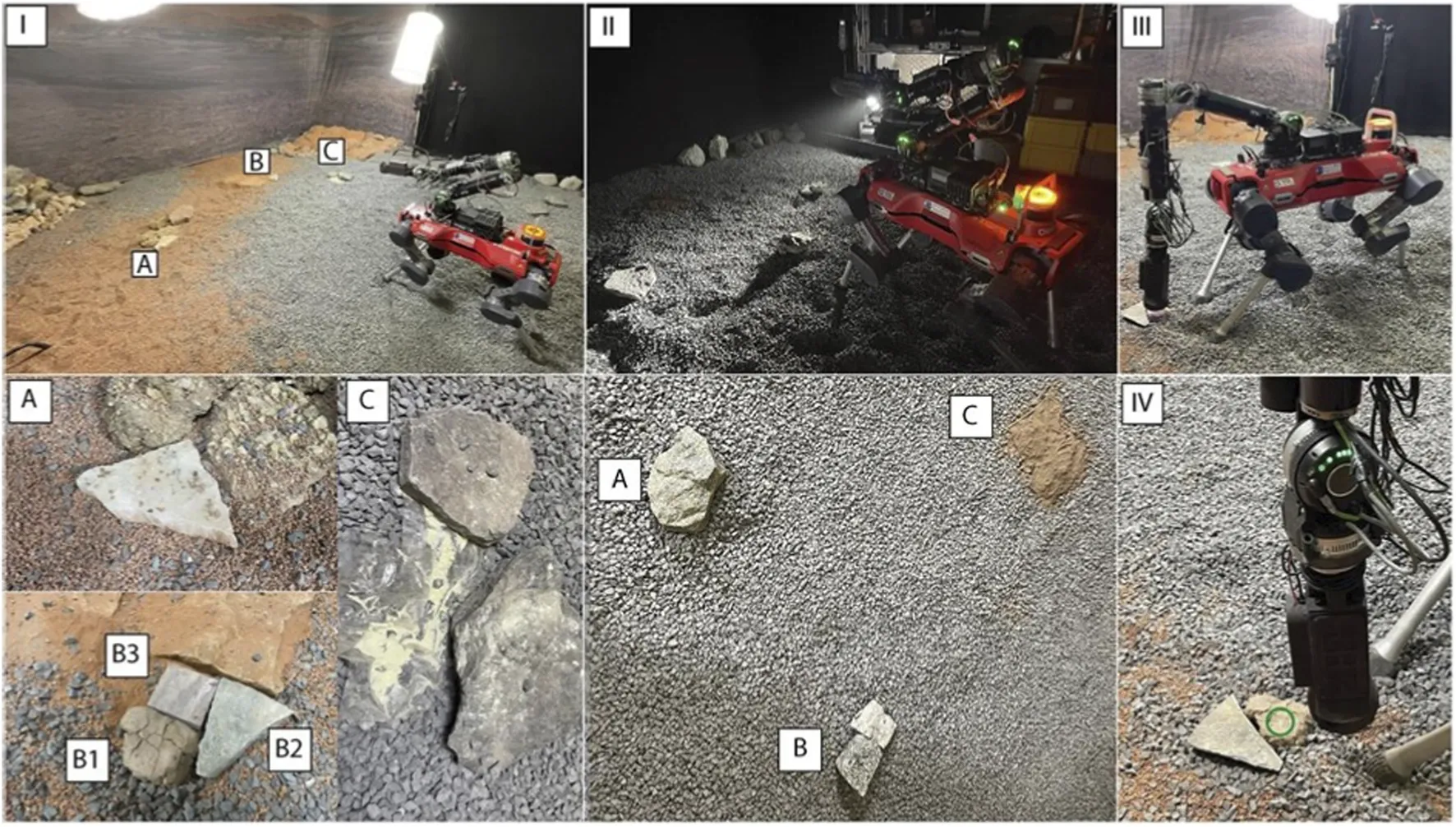
The experiments took place in a controlled analogue environment built to mimic planetary surface conditions. The Marslabor test site included simulated regolith, analogue rocks, and lighting designed to resemble Mars and the Moon.
In the Martian setup, the robot investigated gypsum, carbonate-rich rocks, sandstone-related material, and sulphur on basalt. In the lunar setup, it studied dunite, anorthosite, and rutile in regolith. These are not random geology samples. Notably, the paper notes that such materials are relevant to both in-situ resource utilization and the search for biosignatures, especially on the Moon and Mars.
MICRO provided close-up images of rock textures. Raman spectroscopy helped identify minerals. Together, the instruments gave the robot a way to pair surface appearance with chemical clues.
That pairing mattered. The study found that imaging alone often was not enough for a clear identification, especially when rocks were coated in dust or had fine-grained textures. However, Raman data often made the difference. In one Mars mission, for example, a noisy but recognizable calcite peak helped identify a carbonate target even though the rock itself was partly covered by regolith.
The best of the four Mars analogue runs correctly identified all three selected targets. The other three identified two out of three, for a success rate of 66.7 percent. In the lunar mission, all three targets were identified successfully.
That does not mean the slower method was better in every way. The paper argues that the faster, semi-autonomous approach may be more useful when time, power, or communication delays limit how much ground teams can supervise. For example, Mars Mission 3 reached 100 percent target identification in 15 minutes. This was far quicker than the 41-minute human-guided lunar run.
Still, the researchers are careful about the comparison. The Mars and Moon tests used different sample sets, and one may have been harder to identify than the other. The usefulness index they created to score data quality was also a semi-quantitative internal framework, not a precise continuous measurement.
Other limitations were more mechanical. One recurring problem was off-target arm placement, especially for one Mars target that was successfully identified only once in four tries. Moreover, some MICRO images were blurred because of arm motion or focus issues.
The commercial Raman instrument also had limits. Its spectral range worked well for many minerals, but not for everything. The team notes it was not ideal for complex mineral mixtures such as anorthosite. In addition, it could not directly detect water ice because key Raman peaks for ice fall outside the instrument’s range.
Even with those constraints, the study points to a shift in how planetary fieldwork could be done.
Today’s missions already use autonomy for tasks such as navigation and hazard avoidance, but the paper argues that they still largely follow a single-target, ground-controlled rhythm. By contrast, this robot was able to carry out a sequence of pre-programmed science tasks across several targets in one operational cycle.
That could matter on Mars, where delays slow every decision, and even more on future missions to places like Titan or icy moons, where communication times are far longer. Consequently, instead of pausing after each rock, a robot could survey a small area quickly. It could then send back a richer set of results and help scientists decide where detailed sampling should happen next.
This work suggests future Moon and Mars missions may not need to rely only on large, complex instrument suites and slow, step-by-step supervision.
Smaller, agile robots with compact tools could scan more terrain in less time, flag promising rocks, and support faster resource prospecting and biosignature searches.
The approach is not a replacement for detailed human-guided science, but it could make early-stage surveying much more efficient.
Research findings are available online in the journal Frontiers in Space Technologies.
The original story “Four-legged robots look to speed up Mars and Moon exploration” is published in The Brighter Side of News.
Like these kind of feel good stories? Get The Brighter Side of News’ newsletter.
The post Four-legged robots look to speed up Mars and Moon exploration appeared first on The Brighter Side of News.


Leave a comment
You must be logged in to post a comment.