Soft robots have long promised something rigid machines cannot easily deliver. They offer the ability to bend, flex, and handle the messy unpredictability of the real world. However, there has been a catch. Once many artificial muscles are built, they are stuck with the motions they were designed to make.
A research team in South Korea says it has found a way around that problem. They created an artificial muscle that can be reshaped during use, recover after damage, and even have part of its material reused in another device. This advance could push soft robotics closer to systems that behave less like disposable tools. Furthermore, the systems may become more like adaptable machines.
The work came from a joint team led by Prof. Jeong-Yun Sun of Seoul National University’s Department of Materials Science and Engineering. Prof. Ho-Young Kim of the university’s Department of Mechanical Engineering also led the team. The study appears in Science Advances. Yun Hyeok Lee, Seungwon Moon, and Min-gyu Lee served as first and co-first authors.
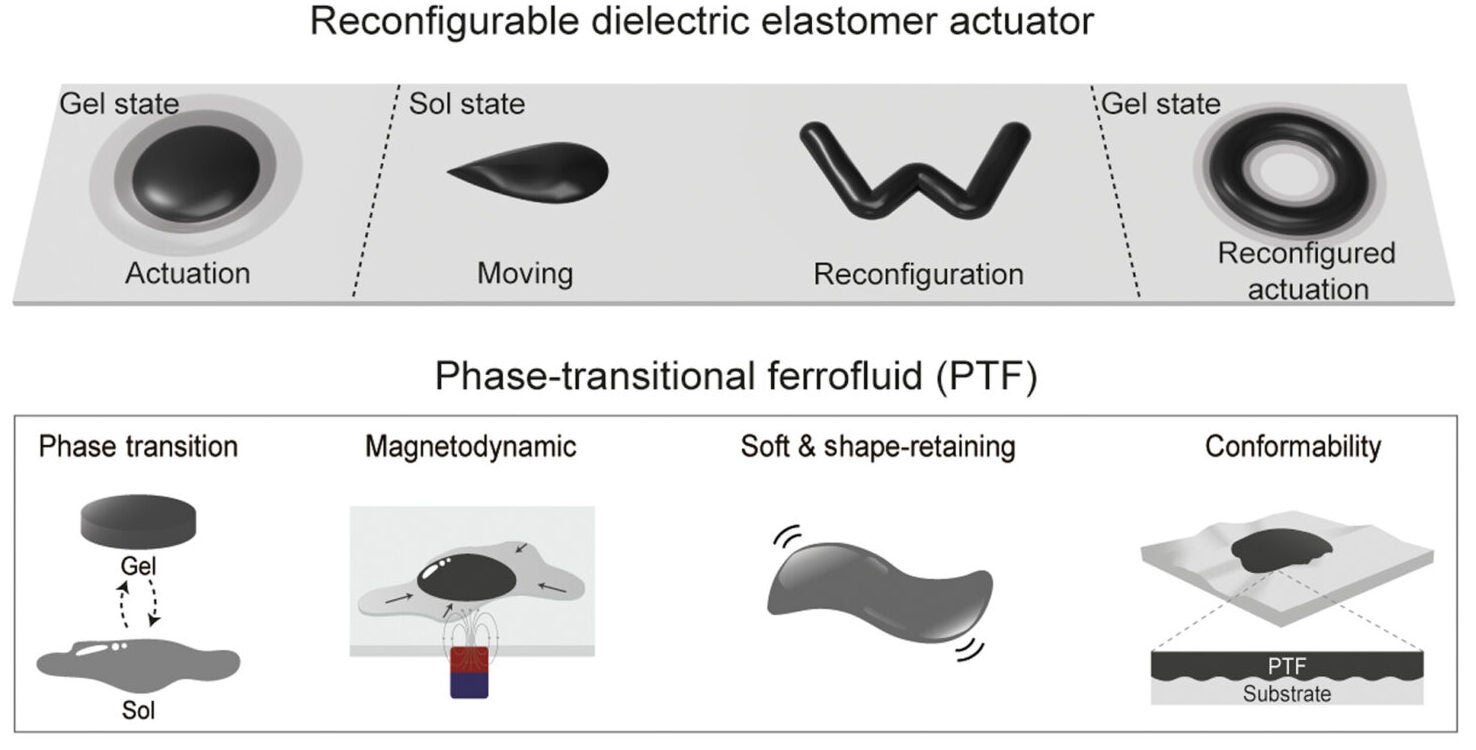
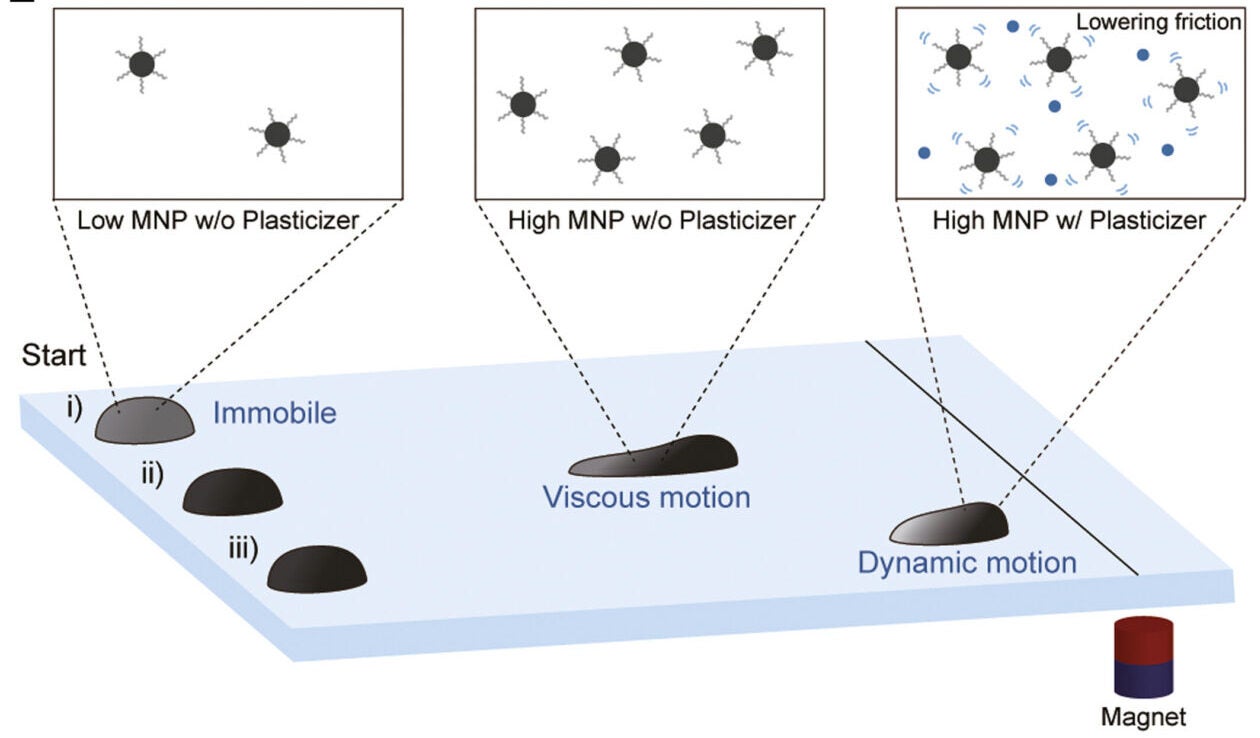
At the center of the study is a new electrode material built with what the team calls a phase-transitional ferrofluid. At room temperature, it behaves like a soft solid. With heat, it shifts into a more fluid state, and a magnetic field can then move it around.
That matters because dielectric elastomer actuators, often called artificial muscles, depend on electrodes to convert electrical energy into motion. These systems are light, soft, and fast. This makes them attractive for uses ranging from wearable haptic devices to robotic grippers that can handle delicate objects.
The trouble is that conventional versions are locked into the electrode pattern printed on them during fabrication. Once that pattern is set, so is the motion.
The new material changes that equation by letting the electrode itself move, split, merge, and settle into new shapes while the device is still in use. In effect, one actuator can be reassigned to different tasks. It does not have to be built for only one.
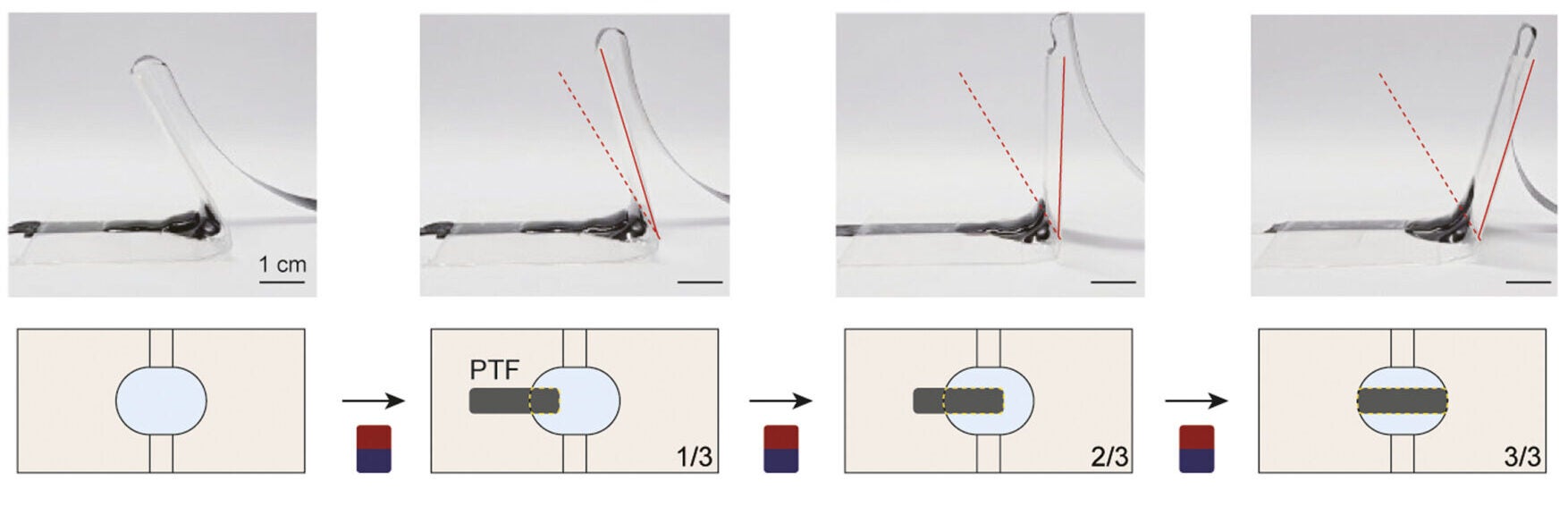
In tests, the electrode shifted between a gel state and a sol, or more fluid, state. When softened, it could be repositioned with a magnet, divided into separate pieces, and even arranged in three-dimensional configurations rather than just flat patterns. After cooling back into its gel state, it could hold its place and keep working.
That gave the researchers a way to alter how the actuator moved without rebuilding the whole system. As a result, a single soft robotic structure could switch among different motions, including bending and expansion, depending on how the electrode was rearranged.
The team reported that the material achieved a large areal strain of about 169% in one configuration. Performance remained similar to conventional carbon grease electrodes used in these systems. The actuator also remained stable over 4,000 cycles. Moreover, the electrode kept working through repeated phase transitions.
One practical advantage was contact. When the electrode formed directly on the dielectric surface through phase transition, it adhered much better than when it was transferred from elsewhere. In one comparison, that direct approach produced 41% areal strain at 36 MV/m.
This compared with 9.6% for a transferred version. Even on contaminated surfaces, the phase-transitioned electrode could flow into cleaner regions and still operate. It reached 21% areal strain under the same field, while the transferred version managed only 5.9%.
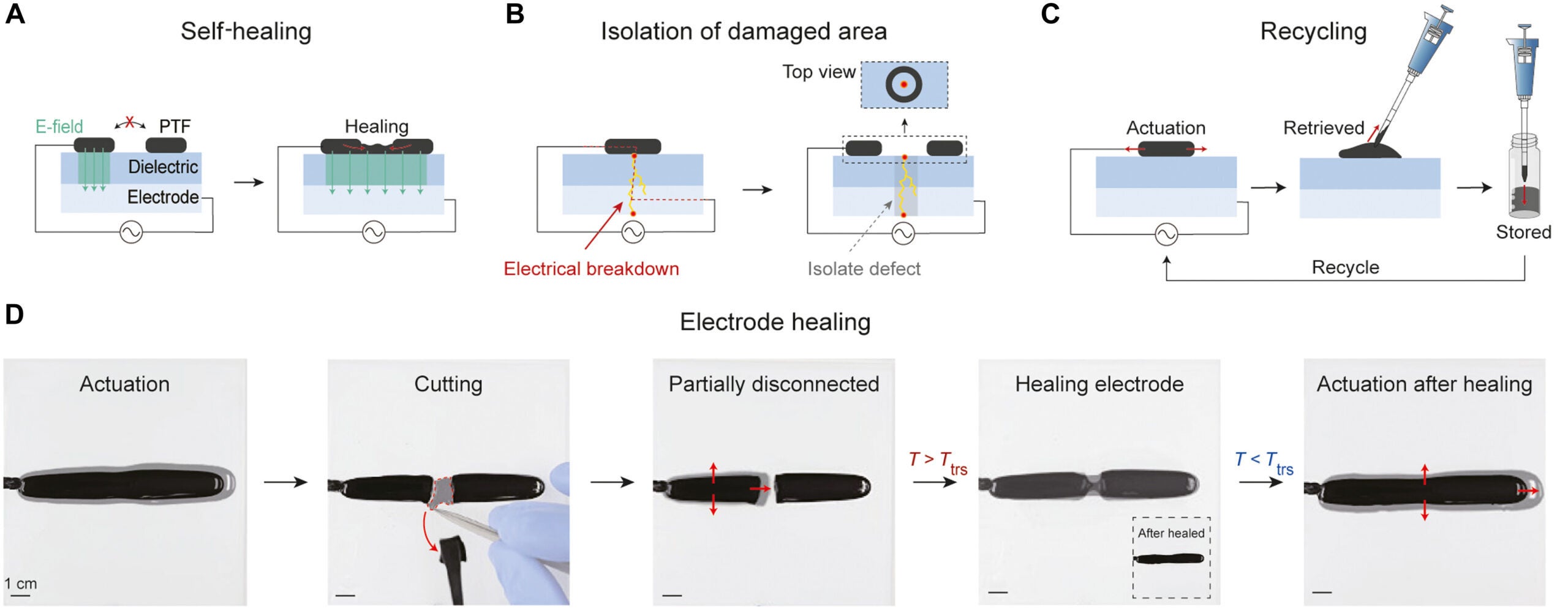
The work also tackled one of the most stubborn problems in soft robotic systems, failure.
If the electrode was cut, the damaged region could be softened, drawn back together with a magnetic field, and returned to a unified gel state. The actuator then recovered its original operation. If the system suffered dielectric breakdown, a common failure caused by excessive voltage, the researchers showed they could magnetically reconfigure the electrode. This allowed them to route around the damaged area and restore actuation.
That recovery strategy extended beyond electrical damage. The same general approach also worked for mechanical punctures or scratches that would normally end the device’s useful life.
“This study represents a breakthrough in transforming traditionally static and passive electrodes into ‘living, programmable elements’ through innovations in particle and polymer design,” Sun said. “This self-healing and shape-reconfigurable electrode technology will serve as a key foundation for sustainable next-generation soft robotics.”
Kim framed the result in terms of freedom of motion. “From a mechanical engineering perspective, achieving high degrees of freedom in soft robots, similar to human muscles, requires structural flexibility,” he said. “Through interdisciplinary integration with materials engineering, we demonstrated that a single robotic structure can generate virtually limitless modes of motion.”
The phrase “virtually limitless” points to the broader ambition behind the work. Biological muscles do not need to be rebuilt every time a body changes tasks. Engineers have wanted something closer to that level of flexibility in soft robotics. However, fixed electrode designs have stood in the way.
The study also pushed on sustainability, an issue not always front and center in robotics research. Instead of discarding an entire device after failure or fatigue, the team showed that the electrode material could be extracted in its fluid state, stored, and injected into a new or repaired device later.
After multiple retrieval cycles, the researchers reported a recovery yield of about 91%. The reused material maintained actuation performance close to its original level.
That makes the work more than a story about motion. It also raises the possibility of machines built with components that can be recovered, reprogrammed, and put back to work instead of thrown away.
The electrode design was also tested beyond artificial muscles. The team said it could be used in stretchable electronics and electroluminescent displays. In those displays, optical information could be written, erased, and reconfigured by moving the material through luminescent layers. In one setup, separate portions of the material handled both actuation and display functions.
Still, the researchers were careful not to claim the system is finished. Their current demonstrations focus on planar devices and simple bending actuators. They said more material optimization will be needed before the approach can be integrated into more advanced architectures such as multilayered stacks and pixel-patterned arrays.
That limitation matters because real-world robotic systems often require more complex structures than the ones shown here.
This work points toward soft robots that do not need to be redesigned every time a task changes.
A single actuator could potentially be adjusted on demand, recover after certain kinds of failure, and reuse key materials instead of being discarded.
That could lower waste. It could reduce manufacturing inefficiency. Moreover, it could widen the kinds of environments where soft robotic systems can keep operating, especially where damage, contamination, or changing job demands are common.
Research findings are available online in the journal Science Advances.
The original story “Reprogrammable artificial muscle can change its shape, recover from damage, and even be reused” is published in The Brighter Side of News.
Like these kind of feel good stories? Get The Brighter Side of News’ newsletter.
The post Reprogrammable artificial muscle can change its shape, recover from damage, and even be reused appeared first on The Brighter Side of News.

