Nature’s most dexterous structures are often thin, flexible, and deceptively simple. A plant tendril coils around a support. An elephant trunk can curl, twist, and lift with extraordinary control. Inside the body, proteins fold into precise shapes that determine what they can do. Now, Harvard researchers have taken a step toward building synthetic versions of that same kind of physical intelligence. They are using 3D-printed filaments that can be programmed to bend, twist, expand, or contract when heated.
The work comes from the lab of Jennifer Lewis at the Harvard John A. Paulson School of Engineering and Applied Sciences. Writing in the Proceedings of the National Academy of Sciences, the team describes a printing strategy that turns soft, hair-like strands into what amount to artificial muscles.
Instead of acting in only one direction, these printed filaments can be designed to change shape in several ways. Those local motions can then be assembled into larger structures that grip objects, filter particles, or rise into domes and saddles.
At the center of the method is a pairing of two very different soft materials.
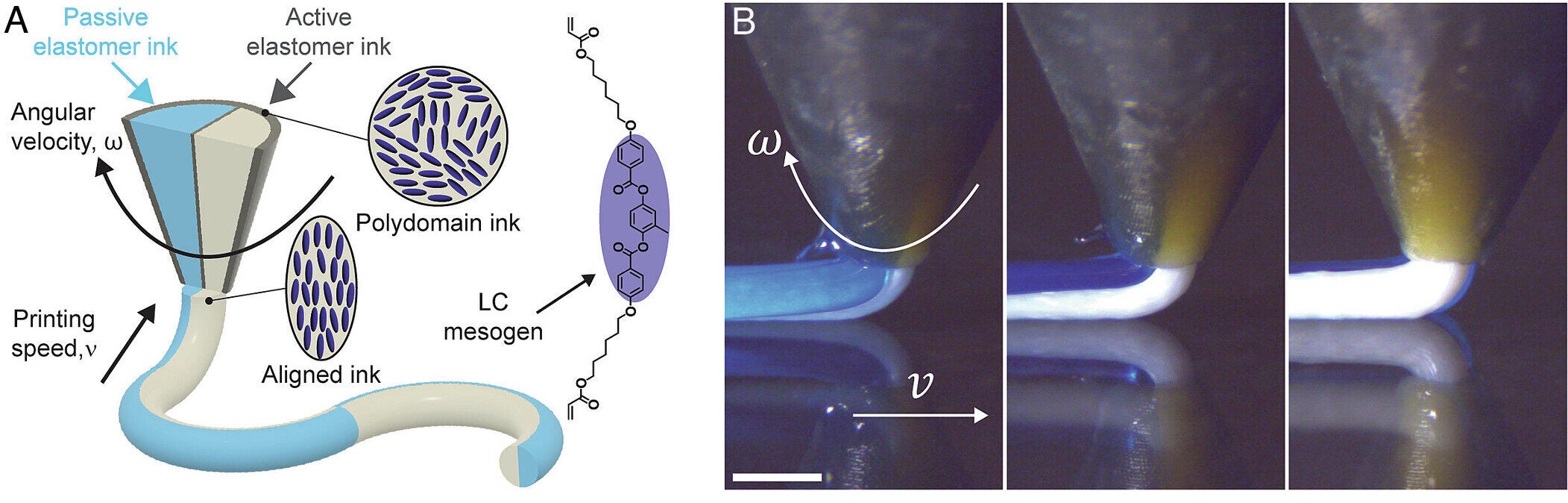
One is an active liquid crystal elastomer, a polymer that contracts along a preferred internal direction when heated above a transition temperature. The other is a passive elastomer that stays largely the same shape as temperature changes. By printing the two side by side through a rotating nozzle, the researchers could decide exactly where the active and passive regions sit around the cross-section of each filament.
That control matters because the active material shrinks when heated, while the passive material resists that motion. If the active region sits on one side of a filament, the strand bends. If the orientation shifts along the filament as it is printed, the resulting strand can also twist or coil. The motion is not added later through assembly or mechanical treatment. It is built into the filament during printing.
The Lewis lab developed the approach, known as rotational multimaterial 3D printing, as a way to prescribe these internal patterns directly. First author Mustafa Abdelrahman, a postdoctoral researcher, had previously worked on sheets of liquid crystal elastomers using more complex fabrication methods. He wanted a more adaptable route. “I saw this really beautiful [rotational 3D printing platform] and thought, ‘What if we plug in active materials and pattern them within the filament – can we drive shape change that way?’”
The answer turned out to be yes.
To help predict how the strands would behave, the group worked with Harvard professor L. Mahadevan, whose team studies the mechanics of natural structures. Joanna Aizenberg’s lab helped verify the internal molecular alignment of the liquid crystal elastomers through X-ray scattering measurements at Brookhaven National Laboratory.
The printed filaments showed strong contrast between their two ingredients. When heated to 150 degrees Celsius, pure active filaments contracted to 0.67 ± 0.02 of their original length. Meanwhile, passive filaments stayed near their starting size at 1.03 ± 0.02.
The active material was also far stiffer, with an elastic modulus of 29.67 ± 2.55 megapascals at 25 degrees Celsius. By contrast, the elastic modulus was 0.57 ± 0.07 megapascals for the passive one. That roughly 50-fold difference gave the team another way to tune how sharply a filament would curve.
The researchers then tested how printing speed and nozzle rotation changed the final motion. Filaments printed without rotation behaved like classic Janus structures, bending because one half shortened more than the other during heating.
As print speed rose from 0.25 to 3.0 millimeters per second, the internal alignment in the liquid crystal elastomer increased, and so did curvature. Maximum curvature rose from 0.13 ± 0.02 mm−1 at the lowest speed to 0.59 ± 0.04 mm−1 at 3 mm s−1.
The more intriguing behavior appeared when the nozzle rotated during printing.
That rotation imposed a helical molecular alignment inside the filament. In pure active filaments, increasing the rotation rate shifted the response from bending-dominated shapes toward twisting and then back again, depending on the helical angle of the internal structure. In composite filaments containing both active and passive halves, the same strategy produced a progression from coiled, bending-dominated shapes to tightly wound helices where twisting took over.
The team also tested durability. Under repeated thermal cycling between 25 and 175 degrees Celsius, the filaments maintained highly reversible curvature for 100 cycles, with no observable degradation. The researchers reported no interfacial debonding, delamination, or slip between the active and passive regions. They attribute this to covalent bonds formed between the two acrylate-based elastomer inks.
The printing resolution is still limited, but the group has already shrunk filament diameters by reducing nozzle size. Using a smaller nozzle, they produced filaments about 300 microns in diameter. They report that custom nozzles and further ink tuning could push the structures down to around 100 microns.
Graduate student and co-author Jackson Wilt said future designs could integrate other functions as well. “In terms of scalability, you could create more complex nozzles that integrate with other materials in the future – like, having a liquid metal channel to enable actuation, or integrating other functionality.”
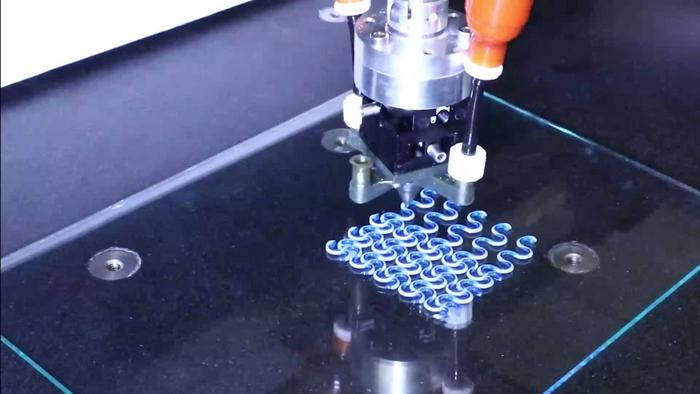
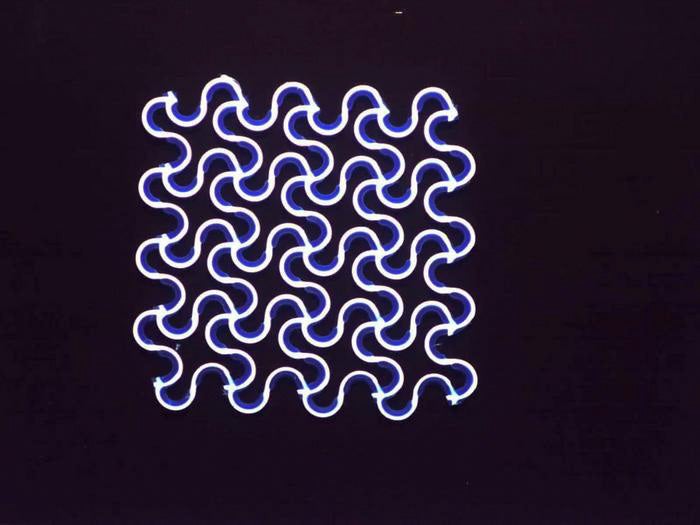
Single filaments were only the beginning. Once the team could program the behavior of one strand, they used those strands as unit cells in larger lattices.
A sinusoidal filament provided a simple demonstration. When the active liquid crystal elastomer was placed on the outer side of the wave’s curvature, heating caused the strand to straighten and lengthen. When the active material sat on the inner side, the same temperature change made the filament curl more tightly and shorten. Those two behaviors could then be woven into architected sheets.
Lattices built entirely from expanding filaments nearly doubled in area on heating, showing a 99 ± 11 percent increase. Lattices built from contracting filaments shrank by 28 ± 11 percent, with their motion limited by neighboring strands making contact and jamming further contraction. After ten heating and cooling cycles between 25 and 150 degrees Celsius, the changes remained reversible. However, the structures did not return perfectly to their original dimensions.
By mixing expanding and contracting regions in the same lattice, the team could push a flat sheet out of plane. One arrangement, with expanding filaments in the center and contracting ones around the outside, rose into a dome with positive Gaussian curvature. Reversing that layout produced a saddle-like shape with negative Gaussian curvature. In both cases, the experiments closely matched computer simulations.
The most immediate promise lies in soft robotic matter that can handle more than one thing at a time. The researchers demonstrated lattices that act as temperature-controlled filters, staying closed when cool so they catch objects, then opening when heated so spheres or hexagonal nuts can pass through. They also built a pick-and-place gripper that contracts around multiple acrylic rods at once, lifts them, then releases them on cooling.
Lewis said, “This filament design and printing framework could accelerate the transition of artificial muscle-like materials from the lab to real-world technologies.”
The study also points to broader uses. Reconfigurable grippers could gently manipulate delicate objects. Active filters and valves could change porosity and flow pathways with temperature. The authors also suggest that entangled injectable filaments might one day lock together into porous structures useful in biomedical settings where rapid tissue clotting is needed.
The researchers are explicit about the broader flexibility of the method. Although this study used liquid crystal elastomers, the same design logic could extend to hydrogels, shape-memory polymers, and dielectric elastomers. That makes the work less about one particular material than about a new way of programming motion into slender structures from the start.
Research findings are available online in the journal PNAS.
The original story “Groundbreaking, 3D-printed, artificial muscles bend and twist on demand” is published in The Brighter Side of News.
Like these kind of feel good stories? Get The Brighter Side of News’ newsletter.
The post Groundbreaking, 3D-printed, artificial muscles bend and twist on demand appeared first on The Brighter Side of News.

