Fish stranded on shore often look helpless, all flops and wriggles. But that clumsy scramble may follow a surprisingly consistent plan, one shared by several species separated by large gaps on the evolutionary tree, and one that could help explain a turning point in the history of life.
A team led by researchers at the University of Cambridge found that a wide range of walking fish use the same basic pattern to move across land. The motion is simple: the fish braces itself with its front fin or head, then swings and pushes the rest of its body forward with its tail.
The researchers call it an “undulating tripod gait,” and they argue that it may be one of the oldest workable answers to a hard problem. How does an animal built for water move across land without legs?
“If you’ve got the ability to walk on land and your predator doesn’t, then you can escape and hopefully the predator moves on,” said lead author Dr Michael Ishida, from Cambridge’s Department of Engineering. “You’ve also got the ability to move from one shallow-water environment to another, like tide pools for example.”
The findings, reported in Nature Communications, come from a mix of fish observations, computer modeling, and a physical robot built to test what kinds of body motions work best on land.
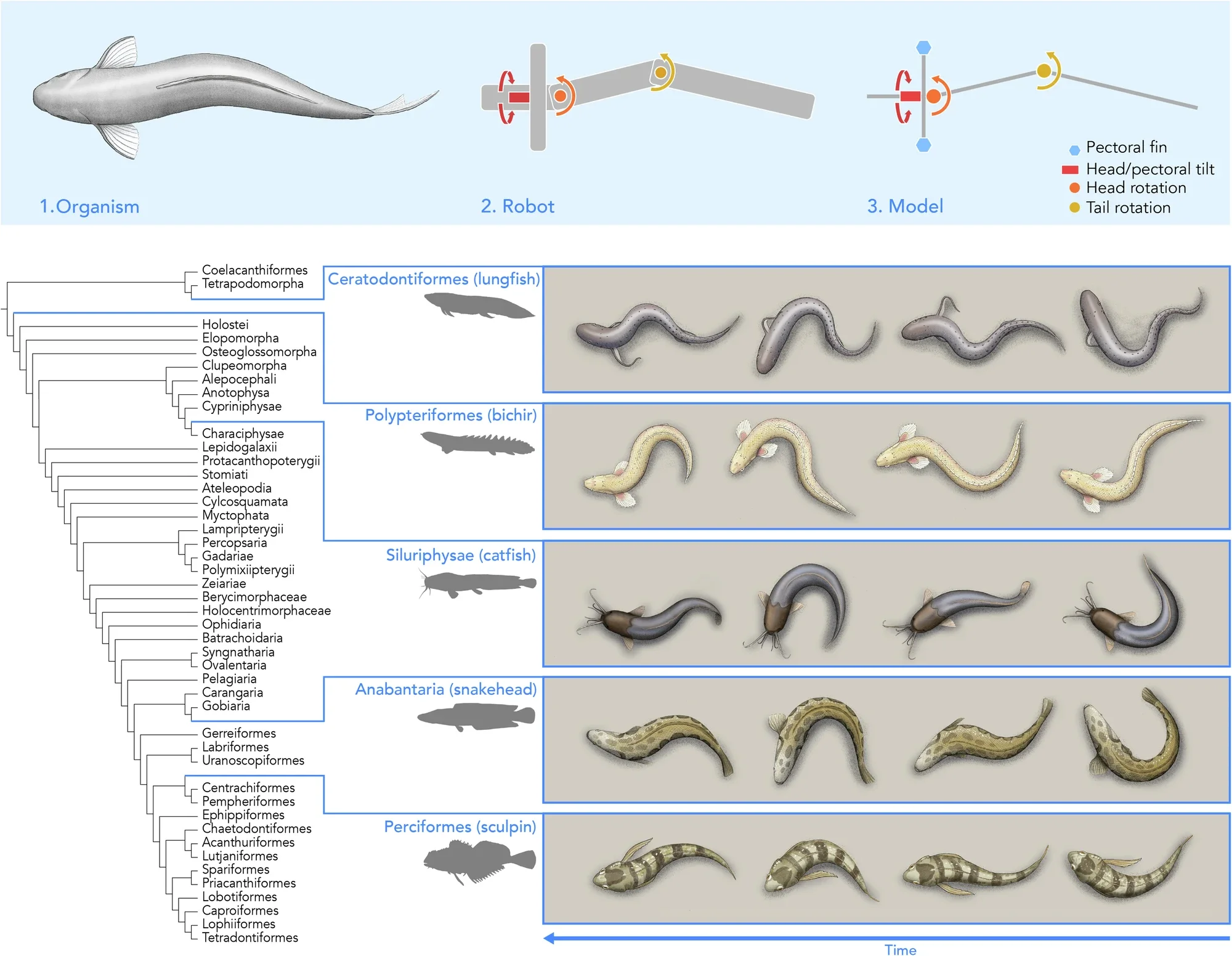
Several modern fish can move on land when they need to, including bichirs, lungfish, catfish, sculpin, and snakeheads. They are not close relatives in any simple sense, and they do not all look or move alike in water. Some are long and slender. Others are flatter or heavily armored. Some rely more on fins, others more on bending through the body.
Yet the team kept seeing the same broad pattern.
“We kept seeing this recurring kind of walking motion, although it’s very primitive,” said Ishida. “A number of different fish, spread out across the evolutionary tree, and not closely related to each other, all do it. It’s such a simple movement and can recur from a very basic starting point.”
To study that pattern more closely, the researchers focused first on Polypterus senegalus, the gray bichir, a ray-finned fish from Africa that can breathe air and move on land. They tracked six specimens over full gait cycles and reduced the fish’s body to three linked segments: head, middle, and tail.
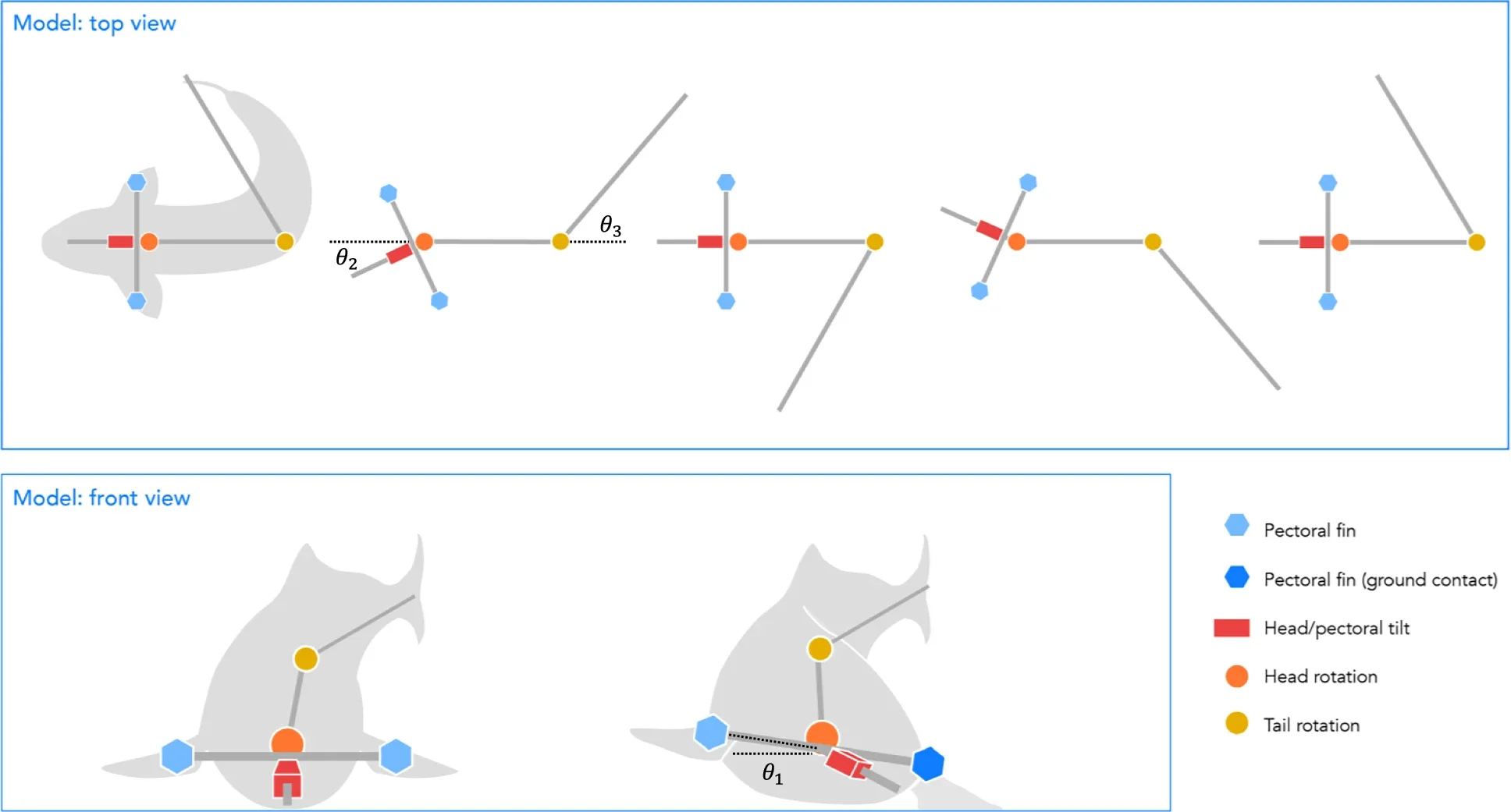
That simplified model captured an important feature of the real animal. During steady motion, the bending at the body joints followed roughly sinusoidal patterns, and the fish alternated which side of the front body made contact with the ground while the tail swept toward the planted side.
In other words, the fish was not stepping in the way a tetrapod does. It was pivoting, bracing, and swinging.
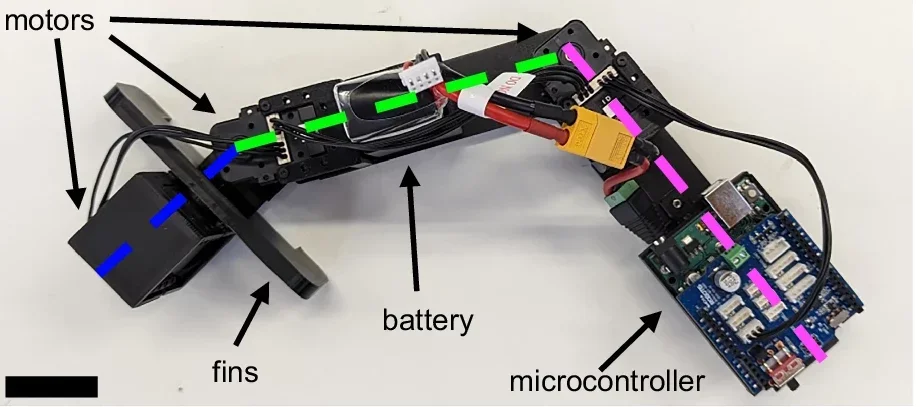
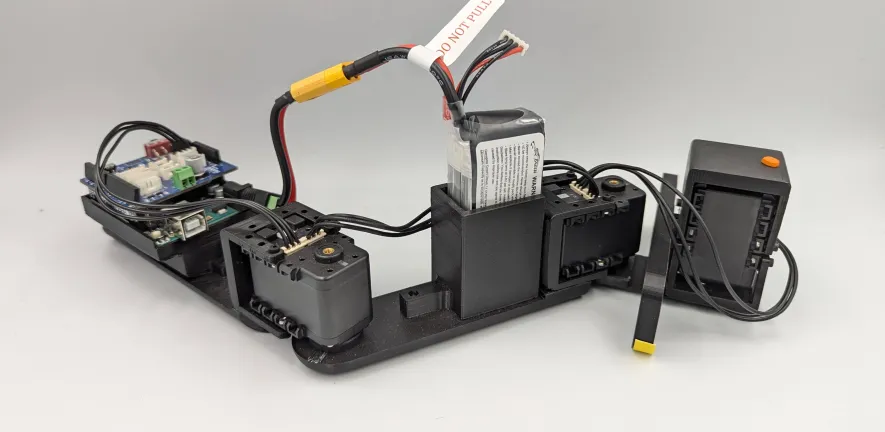
The team then built a simulated robot based on the bichir’s proportions and motions. In the model, the body was divided into three rigid links connected by joints, and a fin-like structure near the head acted as the front prop. Movement came from the interaction between body bending, gravity, friction, and the ground.
The researchers tested how changes in frequency, bending amplitude, and timing affected locomotion. Some changes made the robot faster. Others made it less efficient or even reversed its direction.
Increasing the frequency of body undulation increased walking speed, even though the distance covered in each cycle fell because of extra slipping. Changing the amplitude of body bending also mattered. The simulated robot moved fastest when the head and tail joints used the same amplitudes observed in the real bichir.
Timing turned out to be critical as well. The direction of movement depended on how head motion lined up with fin placement and tail motion. In both the simulations and the fish observations, different phase relationships could shift the system from forward motion to backward motion.
Then came the physical test.
The researchers built a three-segment robot and ran it across real surfaces. Again, the best-performing motion was the same one seen in Polypterus senegalus.
“We tried all kinds of different gaits on the robot, and every other gait we tried was slower,” said Ishida. “Any time we changed how the body bended, or what sequence it was bended in, it was worse. It was surprising that the optimal walking pattern in the simulation and robot matched what the real fish actually do.”
The study also suggests that this gait is robust. The simulations showed it could still work across a wide range of body shapes, even some that would be unlikely in real fish. When the researchers reduced the robot from three moving body segments to two, performance collapsed. But with three segments and the same general coordination pattern, forward movement remained possible across many forms.
That matters because it points to a mechanical principle rather than a trick tied to one species.
The team argues that the gait may be a case of convergent evolution, where unrelated animals arrive at similar solutions because they face the same physical constraints. Here, those constraints come from body shape, bending ability, friction, and contact with the ground.
“It looks like a swimming fish dumped onto land,” said Ishida. “A swimming fish uses its body to propel itself through the water, so if you take that, put it on land, give it some ability to shuffle its front fins, that’s exactly what it’s doing.”
The gait is not elegant, but elegance may not have been the point. A mechanically simple movement that works well enough could help a fish escape danger, survive low-oxygen water, or move between shrinking pools.
It may also offer a clue to the ancient transition from water to land.
The researchers say future work could apply the same approach to fossil species such as Tiktaalik, one of the best-known transitional animals in vertebrate history. Creatures like that lacked fully developed limbs for stepping, but they may not have needed them to start moving onto land.
This work gives researchers a new framework for thinking about how vertebrates may have first managed terrestrial movement before true limb-driven walking evolved. Instead of treating modern walking fish as isolated oddities, it identifies a shared mechanical pattern that can be tested across living and extinct species.
It also shows how robotics can sharpen evolutionary questions. By simplifying the fish body into a few essential parts, the team could test motions and body plans that would be hard or impossible to study in live animals. That could help paleontologists make better, more grounded guesses about how early vertebrates moved in shallow water or on land.
Beyond evolution, the findings may also matter for robotics. A gait that works with minimal control and simple body motions could be useful for machines designed to move through mud, shallow water, or uneven ground where wheels and rigid legs struggle.
Research findings are available online in the journal Nature Communications.
The original story “Robot fish helps explain how real fish learned to move on land” is published in The Brighter Side of News.
Like these kind of feel good stories? Get The Brighter Side of News’ newsletter.
The post Robot fish helps explain how real fish learned to move on land appeared first on The Brighter Side of News.

